●RasPi4B 4WD-Car OS Install & 4WD Car App install
2021.06.29
Pi Car-4WD RaspberryPi 4B に RaspberryPi OS と 4WD Car App を
install します。
micro SD memoryに OS Installを行います。
準備する物 :micro SD card 32GB
FORMATは、FAT32 Formatter という Soft ware が InterNet に
ありますのでこれを使用します。
micro SD Card の Format
32GB までの容量のSD Memory ならば、FAT32 Formatter を使用しなくても
Windows でも FAT32 に Format する事ができます。
SD Memory の Format が終了したら、RaspberryPi Imager で
RaspberryPi OS を作成します。
SD Card に RasPi OS install
Windows PCの C Drive の Imagerから rpi-imager.exe を Clickして起動する。

install OS の選択
OS は install する機器別に何種類もありますが Linux 用は、Desk Top 用の
RaspberryPi full (32bit) を使用します。
install する Storage は USB 変換器に差した SD Card Drive を選択します。
右端の Write をクリックすれば Raspberry Pi OS の書き込みが始まります。
RaspberryPi full(32bit) ver.10 buster
GUI を含む Desk Top 用で標準サポートのアプリも含まれています。
Desk Top の表示画面
左上の RasPi マークから menu を開いて「Raspberry Pi 設定」を選択
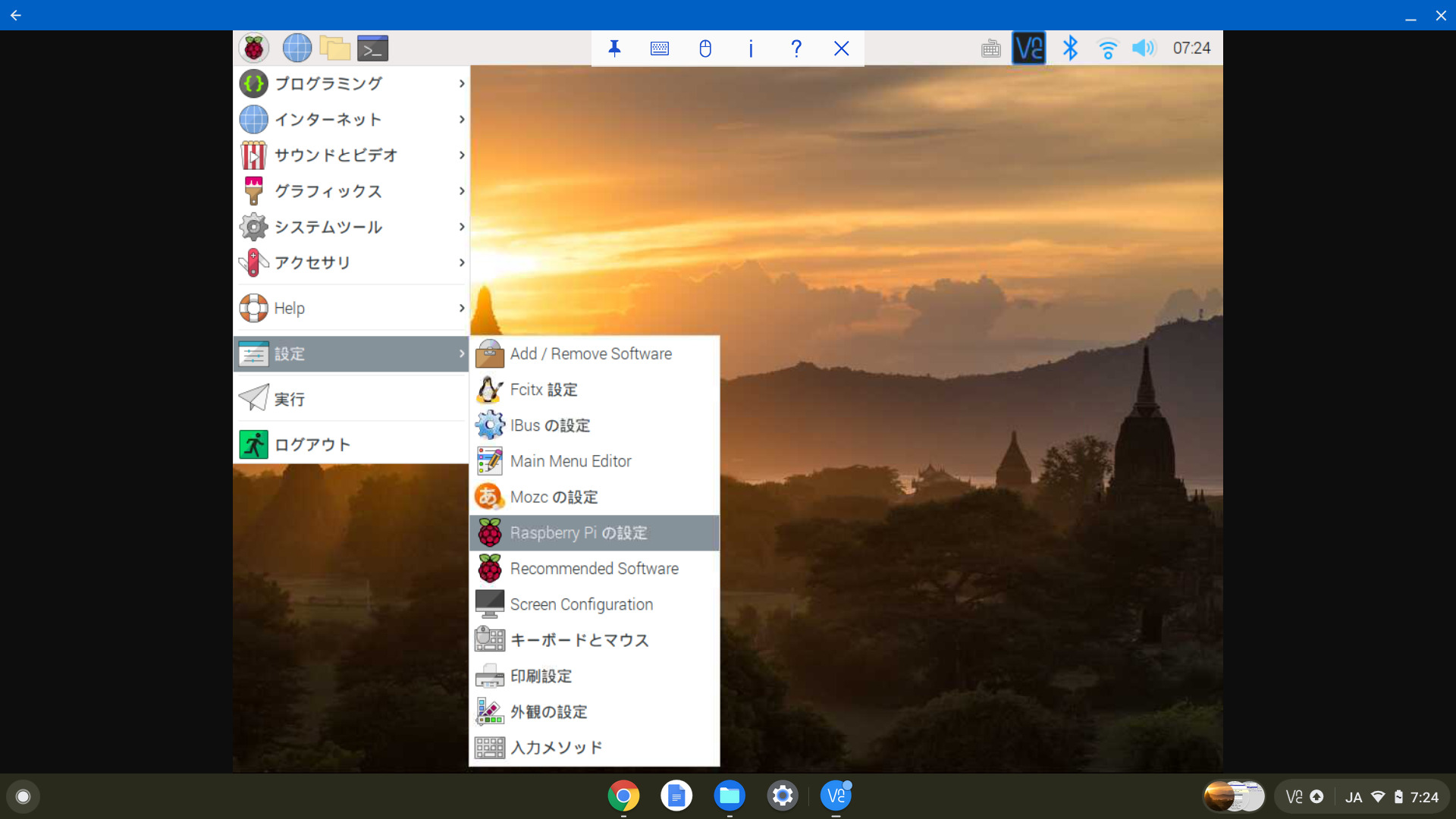
初期設定は GUI で行うことができます。
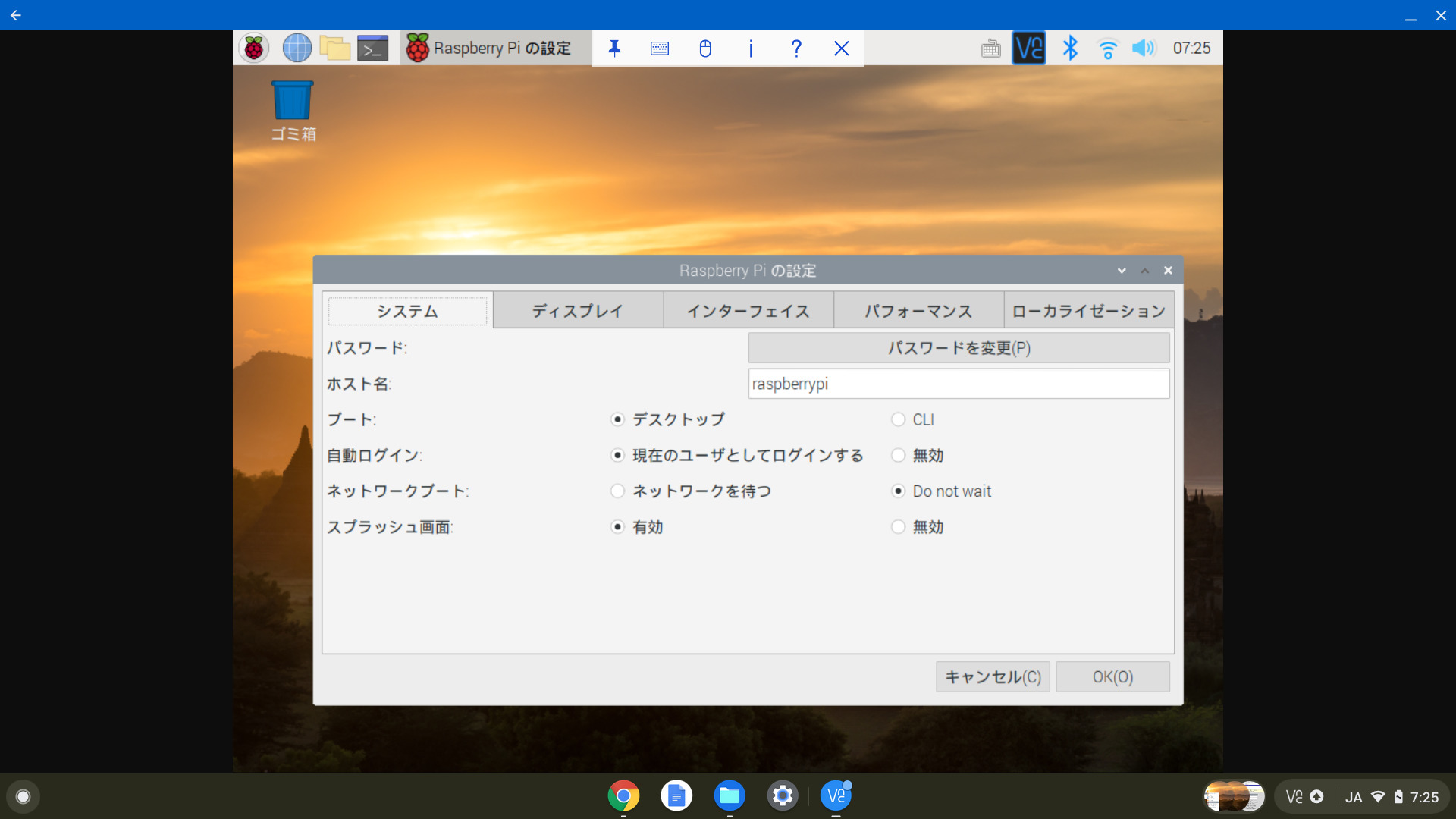
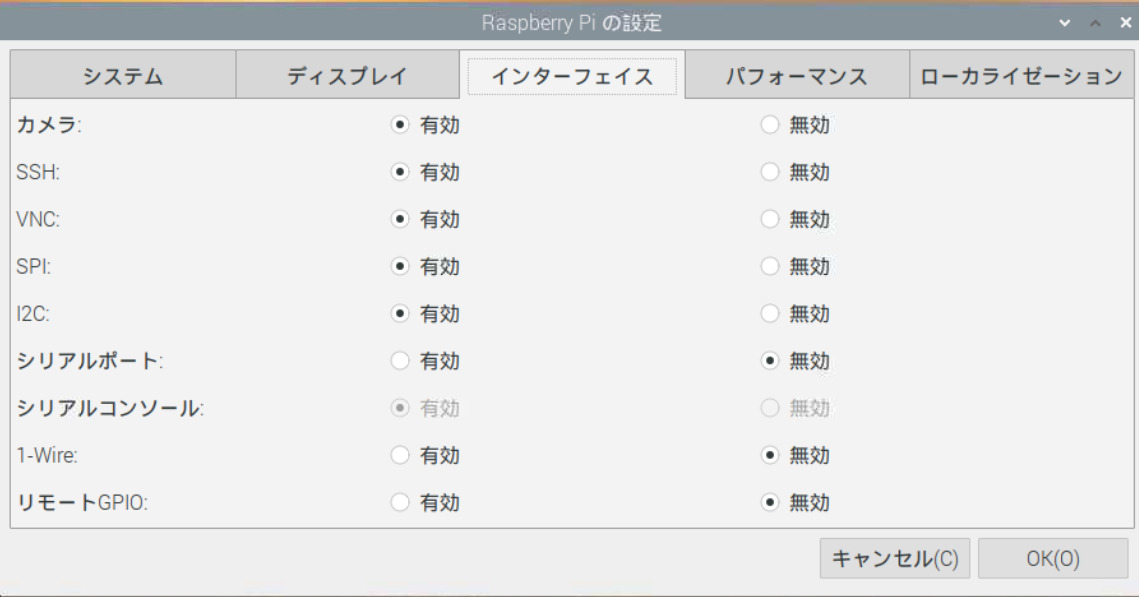
PiCar-4WDに付いている各種 Sensorを有効にするためには、
「RaspberryPiの設定」を選択したならば「インターフェース」Tabを
Clickして I2Cを「有効」に設定します。
Pythonの Version 確認
Default で使用される pythonの version確認をします。
$ python -V
pythonの versionが2.7になっていたら、以下の要領で変更します。
まず、python2.7のシンボリックリンクを削除します。
$ cd /usr/bin
$ sudo unlink python
新たに python3.7のシンボリックリンクを作成します。
$ cd /usr/bin
$ sudo ln -s python3 python
これで python3が defaultになりました。
一応確認してみましょう。
$ python -V
python3.7.3が表示されればOKです。
Pi Car 4WD APP install
1. Module install
$ cd /home/pi
$ git clone https://github.com/sunfounder/picar-4wd
$ cd /home/pi/picar-4wd
$ sudo python3 setup.py install
これで Programの installが終わりました。
Motorや SensorのTestをする事ができます。
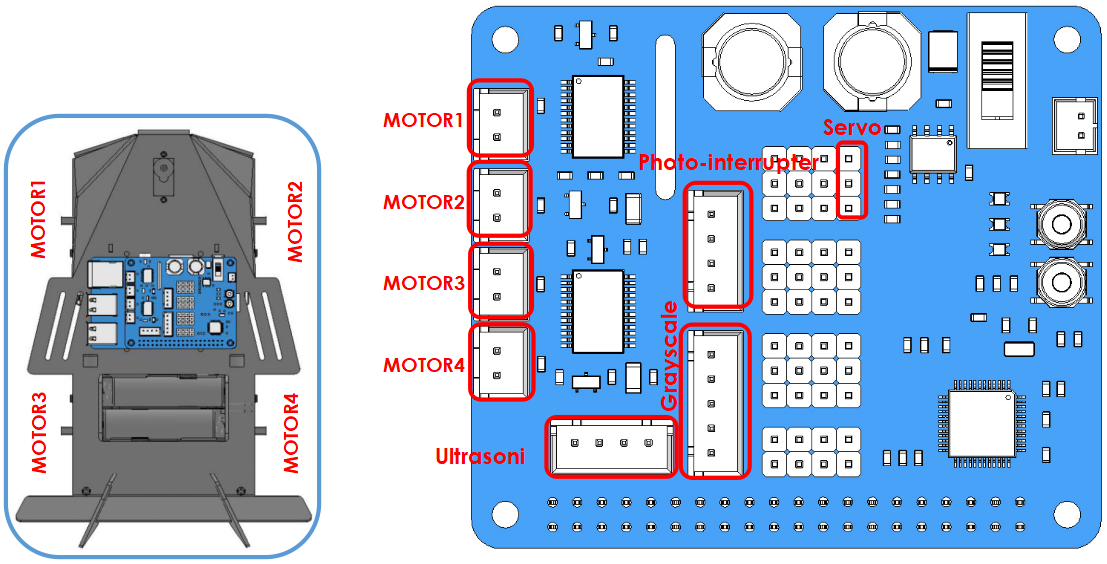
2. Motor 動作Test
下記の様にジャンパーケーブルを接続してTestを行います。
HAT Moduleに電池を取り付けて、電源Switchを ONにします。
下記を Key inすれば Motor Testができます。
$ picar-4wd test motor
4個の Motorが動作します。Ctl+Cを押すまで回転しています。

3. grayscale Sensor module 動作Test
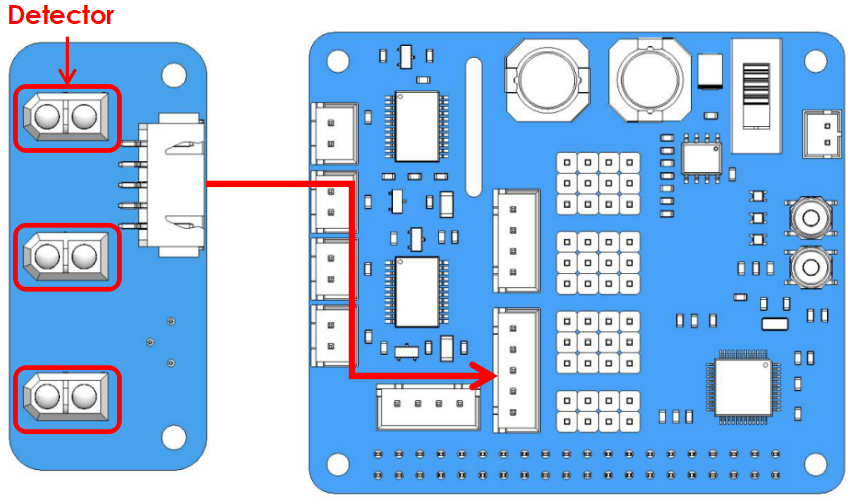
Line追跡を行うための Sensor Moduleです。
$ picar-4wd test grayscale
3個あるSensorが読み取った数値を表示すれば動作良。

4. 超音波Sensor Moduleと Servoの動作Test
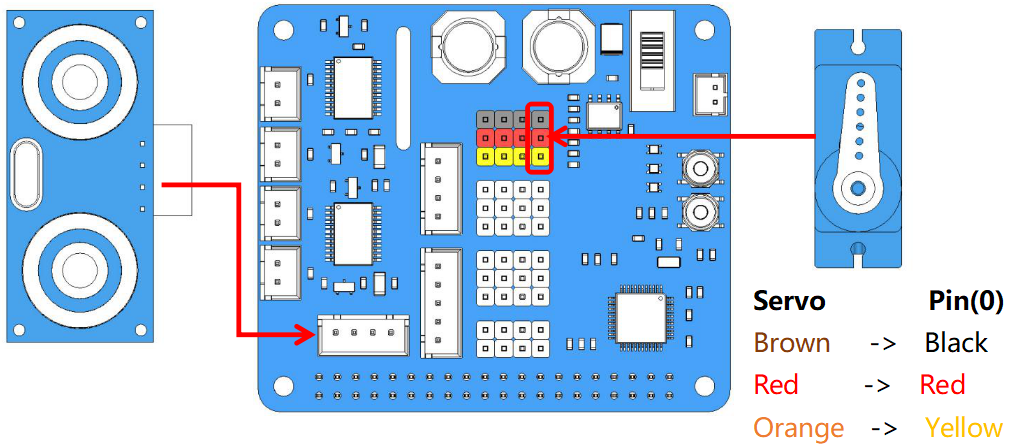
超音波Sensor Moduleと、これを搭載する ServoのTestをします。
Servoは車体の前面180度を探査するために使用します。
$ picar-4wd test servo
超音波Sensorが読み取った数値を表示すれば動作良。

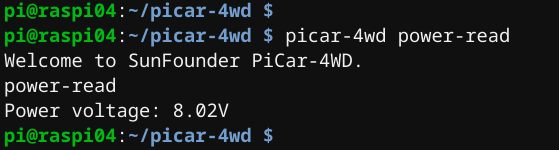
5. 供給電源電圧Check
電池の電源電圧を読み取る事ができます。
$ picar-4wd power-read
電池の電圧が表示されます。
6. Reset
HAT Moduleを Resetするための Commandです。
$ picar-4wd soft-reset
7. 自動起動
電源を起動したら自動的に Programを起動できる様にします。
$ picar-4wd web-example enable
電源を立ち上げたらパソコン又はスマホの Web Browserを起動して
picar-4wdの IP Addressを keyinすればつながって制御できます。
----------------------------------------------------------------------------------------------------------------------------